

江戸っ子1号プロジェクト
江戸っ子1号プロジェクトは、2009年に葛飾区の小企業「(株)杉野ゴム化学工業所」の杉野行雄社長が大阪の中小企業の人工衛星プロジェクト「まいど1号」計画に触発され、東京下町の企業で未知の世界である「深海」を調査することのできる無人探査機をつくりたいという熱い思いからスタートしました。
その後海洋研究開発機構にも輪が広がり、様々な技術課題や困難を乗り越え、紆余曲折を経て2010年2月、「フリーフォール型ガラス球深海カメラ」の提案が行われ、プロジェクトが一挙に動きだしました。
2013年11月には日本海溝南端海域(水深7,700~8,000m)を試験海域とし、実海面での本格的な海上試験が実施されました。2014年の小笠原諸島父島沖1,300m海域での魚類撮影に続き、日本海、オホーツク海でも撮影が実施されました。
2015年には海洋研究開発機構にも江戸っ子4機が納入され、さらなる活躍が期待されています。2015年以降は岡本硝子(株)を中心とした江戸っ子1号事業化グループが発足され、さらに2017年には江戸っ子1号活用支援グループが立ち上げられました。
(株)ソニックは江戸っ子1号活用支援グループの一員として、日本だけではなく世界の海洋計測ステージで江戸っ子プロジェクトのプロモーションを実施し、カスタマイズを含む江戸っ子を活用した応用調査支援等の提案を積極的に実施してまいります。
江戸っ子1号が捉えた深海世界
江戸っ子1号が初めて本格的な深海に挑戦した相模湾640m海域での映像です。エゾイバラガニやヌタウナギが餌を取り合い、ヒトデが這い回り、クラゲが時々目前を流れ去っていきました。

小笠原父島沖水深1,200m海域では、餌のにおいに引かれて集まったカニとアナゴの類が10時間のビデオ撮影中絶え間なく現れて動き回っていました。

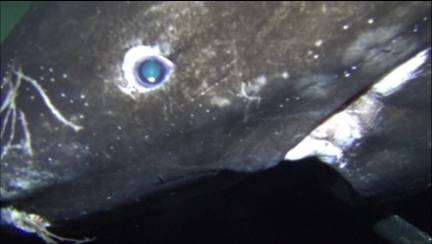
日本海溝 4,000m海域では1mから1.5mの巨大なヨロイダラやソコボーズが餌を取り合う姿や、時折小型のサメが目前を横切る等、豊かな深海の風景が繰り広げられました。8,000m海域では餌台にたくさんのヨコエビや、そのヨコエビを狙ったシンカイクサウオが撮影されました。


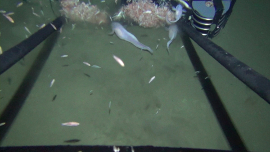
これらの実験の結果から、複数の海域の異なる深海でも多くの魚類やアナゴ、ヨコエビ、サメ等が存在し、また、深海にも海水は常に流れていてその流れによって世界の海が繋がっていることがよくわかりました。

江戸っ子1号仕様
江戸っ子1号は撮像を主体とした環境調査に最適な深海用の小型探査機です。水深8,000mまでの様々な深海環境で調査・探査が可能であり、ビデオ撮影や指定の各種センサーによる海洋計測も可能にします。この仕様により、海溝などの特別に深い海域を除き、ほぼ全ての海底観測が可能になりました。
江戸っ子1号は躯体に耐腐食性のフレームを採用(HSG型)することにより比較的浅い深海での海水腐食への耐性が格段に向上し、6か月に渡る長期定点観測を実現しています。
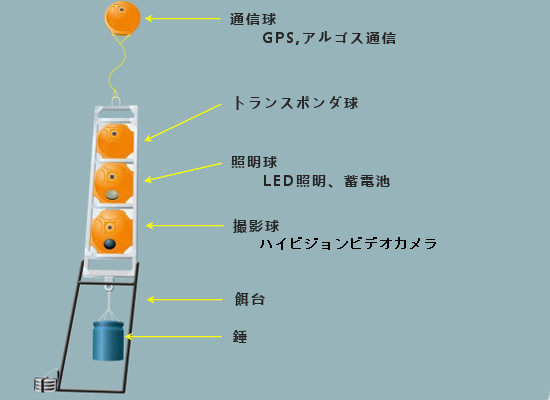
江戸っ子1号は耐圧性能を備えたガラス球と切り離し機構が付いたフレーム、通信装置が主な構成であり、ユーザ様のご要望により柔軟にカスタマイズする事が可能です。
| ガラス球 | 外径 33cm |
|---|---|
| 最大深度 | 8,000m |
| カメラ | ビデオカメラ |
| 撮影時間 | 10時間(連続/間欠) |
| 空中重量 | 50kg(本体) |
| 全長 | 160cm(本体) |
| 幅 | 50cm(本体) |
| 浮力 | 30kg |
- 音響システムによる錘切離しGPSとアルゴ通信システム
- 別途支援船側に音響発信システムが必要になります
硫化水素海域で6ヶ月観測を継続

フルデプスを目指してガラス球を開発中

- 江戸っ子1号は、岡本硝子(株)製のガラス球を耐圧容器兼浮力体として用い、ガラス球内に任意の計測器を配置し、ガラス球間を海中無線通信(特許申請中)で行う事により、海中においても地上と同様のLANシステムを構築できることが大きな特徴です。
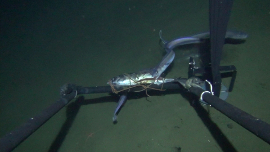
- 海底に錘を据え置き、鎖で機体を浮かせる方式により、不規則な海底であっても安定した姿勢を確保でき、かつ潮汐の影響で機体が回転しないシステムを採用しています。
- 機体はカメラと照明及びトランスポンダのガラス球ユニットからなり、小型船舶から少人数での海上投入を可能にします。また、ガラス球には塩分濃度、海水温度、深度計などの海洋センサを搭載する事が可能で、これら機器の搭載により浮力が不足する場合には直列にガラス球を加える事により浮力調整が可能になります。
- カメラと照明を別のガラス球に収納し、海中無線ゴム(特許申請中)を用いて連携することにより、ガラス球内での光の乱反射や虚像などによる映像の低コントラスト化等を防止する事が出来、海底でもクリアな撮影を可能にします。
- 躯体、ガラス球のカバー、クッションゴム、錘、錘切り離し装置等に耐腐食性の材料を採用しました。これにより低いpH雰囲気(酸性環境)に長期間(6か月間)の観測に耐える事が可能です。